
Summary: "Growing up with Lucy"
Content
HomeArticles
Gallery
Books
Lego
Personal
Links
Help
Articles
Original docAnnotated Topo
Specifications
Summary: "Growing up with Lucy"
TOPO II Firmware
JNI + JAR + Applet (+ Cygwin) HOWTO
Summary: "On Intelligence"
print layout
This article summarizes a number of key concepts that are found in Steve Grand's book "Growing up with Lucy". This book tells the story of his journey to build an android with "artificial intelligence" in order to try to understand mammal-like brains and intelligence.
-
"Synthesis can be more powerful than analysis", especially
with emergent properties.
(page 38,47) -
Recurrent neural networks (i.e. with feedback loops) have more
interresting properties than simple feed-forward ones. They have
complex dynamic internal states.
(page 33) -
There are three or four possible architectures in nature.
- Ad hoc networks which suffice for very primitive creatures, with the neuron as basic building block.
- Repeated circuits of neurons for insect-like intelligence, reconfigurable by evolution.
- Arrays of neurons (maps) for mammal-like intelligence, reconfigurable during the creatures own lifetime.
- Switching information between existing maps at will for human- and primate-like intelligence.
-
Brains and our sensory and motor systems have co-evolved.
(page 56) -
Simulating an arm (with a pair of muscles) using a servo
attached to the joint by springs and translating the desired
muscle tensions in an offset between the position of the arm
and the position of the servo.
(page 59-60) -
The retina 'enhances' edges in the image, because edges are
independent of the absolute brightness of the image and lightning
conditions. Edges isolate objects from each other and from the
background.
(page 77)
-
Each eye transmits two 'images' to the brain. One telling how much
darker each pixel is than its neighbors, and one telling how much
lighter each pixel is compared to its neighbors.
(page 79)
-
Brains are predictive and not reactive to the
environment, because of signal delays for one reason. To keep
the eyes focused on a flying bird the eyes need to be turned
to the position where the bird will be after the eye muscles
received the the signals from the brain and moved the eyes.
(page 106)
-
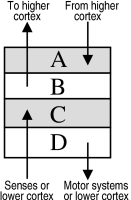
The six layers (I, II, III, IV, V and VI) in the cerebral cortex
can (probably) be simplified in to four layers (A, B, C and D)
model, where each layer either receives input from higher cortex
maps (layer A), outputs to higher cortex maps (layer B), receives
input from senses or lower cortex maps (layer C), or outputs to
motor systems or lower cortex maps (layer D). Thus several
cortex maps can be chained together and form a tree (or network)
structure.
(page 123-125)
-
Each cortical map could be seen as a servo. One input (to layer C)
is the sensory input, one input (to layer A) is the desired set
point, and one output (from layer D) is the motor output. The
second output (from layer B) is the feedback to the secondary
cortical maps.
(page 136)
-
In a predominant sensory chain of cortical maps the flow from
higher to lower maps (and motor output) represents attention
or anticipation, whereas in a predominant motor chain it
represents intention.
(page 137)
-
In the virtual cortical map V1 the neurons are grouped in
semi-regular clusters with each neuron detecting an edge in a
different orientation. This is achieved by distant neurons
inhibiting eachother, and nearby neighbors exciting eachother.
(page 150,153)
-
The cortical map V2 around V1 might turn an object centered
image produced by V1 into a size and orientation independed
'time signature' from the shape of the object. The radial stripes
of V2 might collapse the projected image to the center, whereby
the number of 'pixels' reaching the center at any one time creates
the 'time signature'.
(page 162-163)
-
The developing retina of a child helps (self-)organizing the
neurons in cortical map V1 by generating waves of activity in
the absence of light. These waves are generated by each neuron
exiting its neighbors, except for the ones recently fired.
(page 170-171)